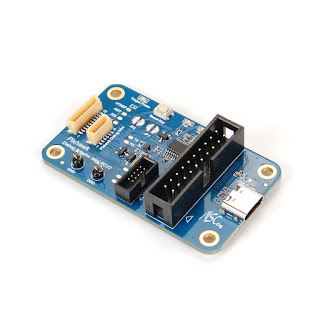
This particular microcontroller caught my interest because of its 4.2MB of SRAM. That said, you should know that it has 0 bytes of internal flash memory, and that's where the problems begin. Having no internal flash memory is that make it difficult to develop on this board. 4.2MB of internal SRAM can be useful for certain applications, but to utilize it effectively, you need to understand a few things. First is the First Stage Bootloader (FSBL), which likely assumes you'll also need a Second Stage Bootloader (SSBL), and the answer is yes! Since there’s no internal flash, your code must reside on external flash memory. The microcontroller has a mechanism to copy code into AXISRAM2 and execute it from there. However, the initial code is limited to 256 KiB and it starts from address 0x34180400 . To understand why this is somewhat problematic, take a look at the address space of AXISRAM2. In the table, we can see a continuous RAM address range up to 0x34400000. Th...